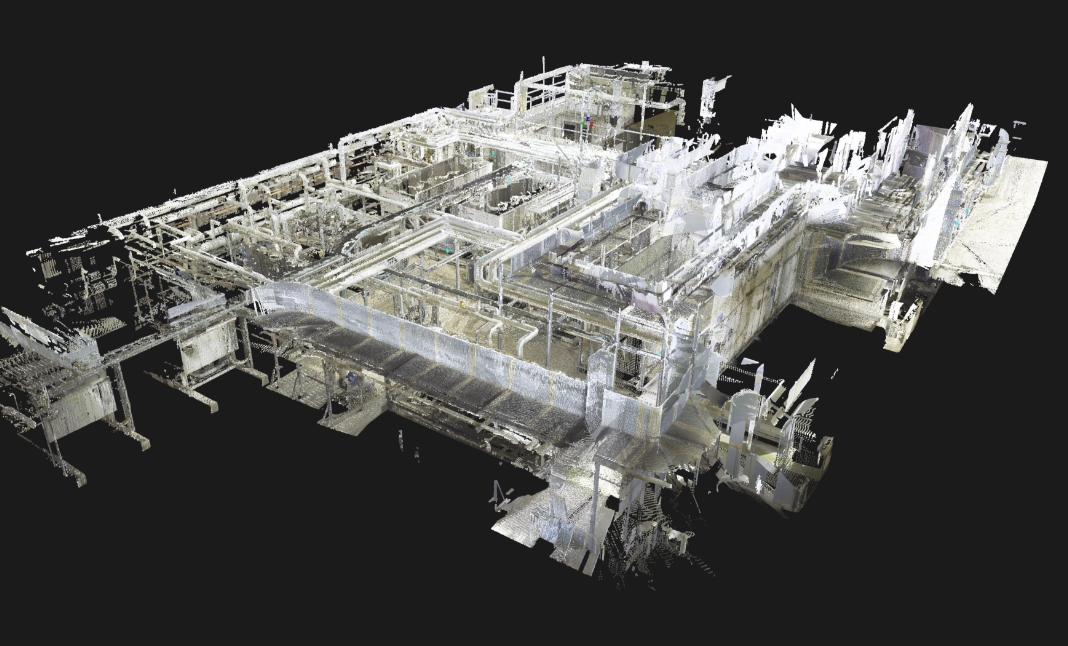
באמצעות טכנולוגיות חדשניות, תוכנות מחשב מתקדמות ולא פחות מכך בזכות צוות העובדים המקצועי, המנוסה והמגוון שלנו, אנחנו מסייעים למאות לקוחותינו במדידה, תיעוד, מידול ומיפוי גיאומטרי תלת ממדי של מבנים. אנו גאים להיות החברה הוותיקה והמובילה בתחומה
לאורך השנים ביצענו מיפוי של עשרות אלפי מ״ר ופיתחנו שיטות עבודה ייחודיות למיפוי חזיתות תוך הבנת הצרכים של קבלני החיפויים השונים אשר מאפשרת לכם להיות טובים יותר.